在人机交互与智能制造快速发展的今天,如何让机器人像人类一样“听懂动作”,一直是核心挑战之一。尤其是在机械臂控制领域,传统依赖电池供电的可穿戴传感器不仅结构复杂、续航受限,还面临环境污染和系统集成度低等问题。如何实现无需电池、实时响应且高效稳定的动作感知与无线传输,成为制约下一代人机接口技术的重要瓶颈。
在此,中国科学院纳米能源与纳米系统研究所王中林院士联合重庆大学蒲贤洁副教授团队提出了一种全新的解决方案:基于摩擦纳米发电机与强耦合磁共振技术,研究团队开发出一种完全自供能的无线传感系统,实现了人体手臂运动到机器人控制信号的直接转化。该系统不仅摆脱了电池依赖,还在能量输出、信号稳定性和系统集成度方面实现突破,为智能制造、医疗机器人以及虚拟现实等领域提供了全新技术路径。相关成果以“Self-powered triboelectric wireless sensor for robotic control via enhanced electromagnetic induction”为题发表在《Nature Sensors》上。Shanshan An和Sizhao Liu为共同第一作者。
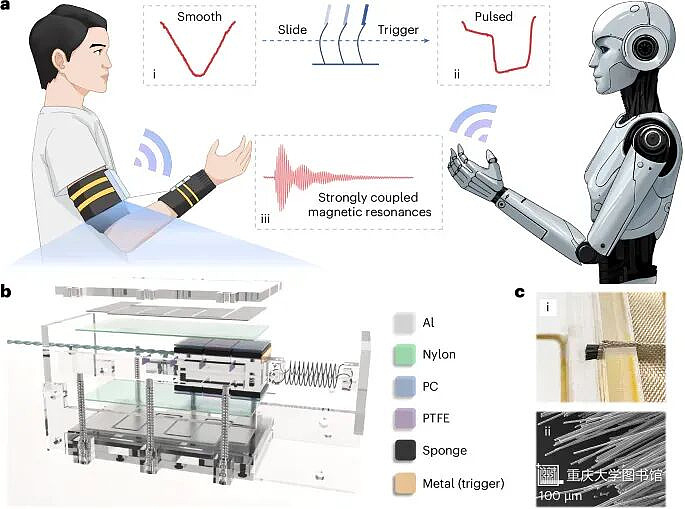
这项工作首先构建了一个完整的人机交互系统框架——自供能无线臂控系(SWAi)。如图2a所示,该系统将人体手臂动作直接转化为无线信号,并实时驱动机器人执行对应动作。其核心在于一个佩戴于上臂的传感单元SAMS,通过绳索与前臂连接,当手臂弯曲或伸展时,内部滑块产生往复运动,从而触发能量产生与信号发射(图2a(i–iii))。进一步来看(图2b),这一传感器的核心模块是双层三元摩擦纳米发电机(DTE-S-TENG)。它通过尼龙、PTFE、PC等不同材料的摩擦起电特性,在滑动过程中不断积累电荷。值得注意的是,研究团队并未采用传统“能量储存-再释放”的路径,而是通过机械开关将连续电荷输出转化为瞬时脉冲信号,从而直接驱动无线传输。这一设计极大简化了系统结构,也为后续高效信号传输奠定基础(图2c)。
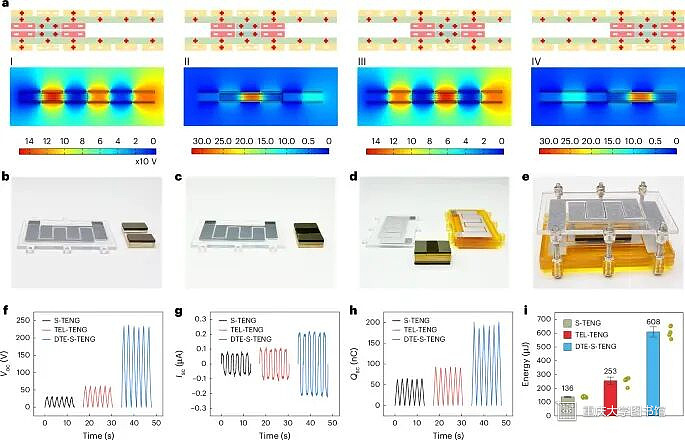
在能量层面,这项工作的关键突破来自于DTE-S-TENG的结构设计。如图3所示,研究团队将传统单层摩擦发电结构升级为“双层+三元材料”体系,使得电荷分布更加充分,能量输出显著提升。从实验数据来看(图3f–i),该结构在相同条件下可产生高达237 V的电压、0.2 μA电流以及200 nC电荷,其单次循环能量输出达到608 μJ,分别是传统结构的4.5倍和2.4倍。这意味着,仅依靠手臂自然运动,就可以提供足够能量完成信号生成与无线传输。更重要的是,这种结构通过优化材料间电荷保持能力(如PTFE表面电荷稳定性)与降低摩擦阻力,实现了高效率与舒适性兼顾。这对于可穿戴设备而言尤为关键——不仅要“能用”,还要“好用”。
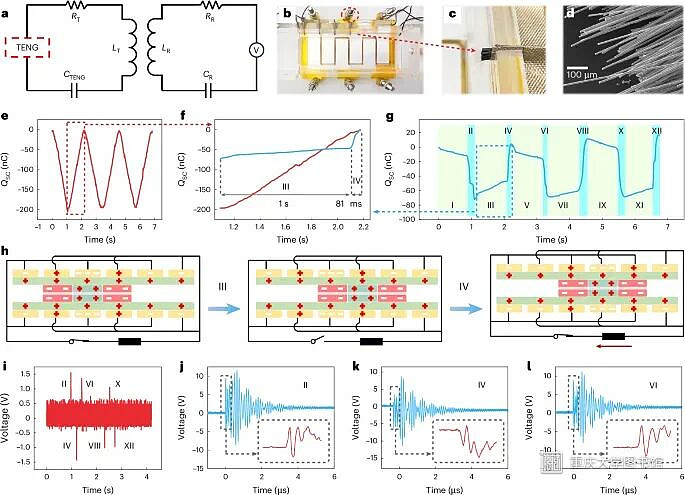
解决了能量来源问题后,下一步就是如何实现稳定的无线信号输出。图4给出了这一过程的完整机制。系统在发射端通过LC电路产生振荡电流,并通过线圈形成变化磁场;接收端通过电磁感应产生对应电信号,实现无线传输。这一过程基于强耦合磁共振(SCMR),当发射端与接收端谐振频率一致时,能量传输效率达到最大。但真正的关键在于“脉冲触发”。由于连续输出功率不足以激发振荡,研究团队引入碳纤维机械开关(图4b–d),在滑块运动过程中周期性接触导通,使电荷在81 ms内快速释放,形成高瞬时功率脉冲(图4g)。这一设计使系统无需储能元件即可实现无线信号触发。在实际测试中(图4i–l),每一次手臂动作都会产生多个清晰的无线信号脉冲,且相邻信号方向相反,这一特征还可用于提升信息编码密度,为复杂控制提供更多可能。
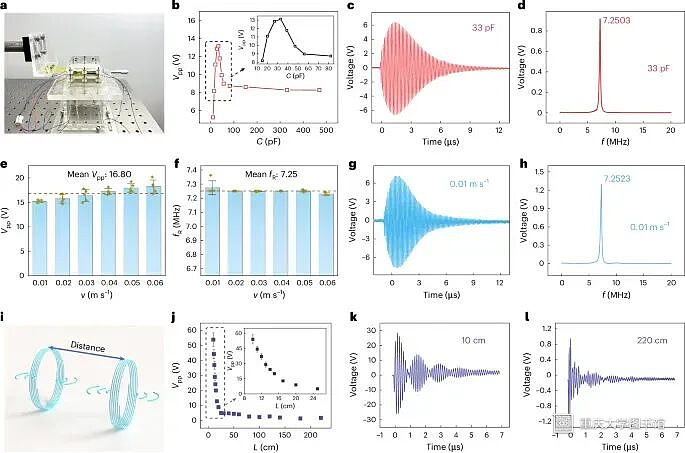
对于无线系统而言,稳定性与传输距离至关重要。图5系统评估了多种参数对信号的影响。首先是电容匹配问题。实验表明,当接收端电容为33 pF时,信号强度达到最大(图5b),对应谐振频率约7.25 MHz(图5d)。这说明系统可通过简单参数调节实现性能优化。其次是运动速度。随着滑动速度从0.01 m/s提升至0.06 m/s,输出电压略有增加,但频率几乎不变(图5e,f),说明系统对人体自然动作具有良好适应性。在传输距离方面,尽管信号在0.25 m内快速衰减,但在更远距离(最高2.2 m)仍保持清晰波形(图5k,l)。即使在存在障碍物(如人体或金属)的情况下,信号依然可被稳定检测,展现出较强抗干扰能力。
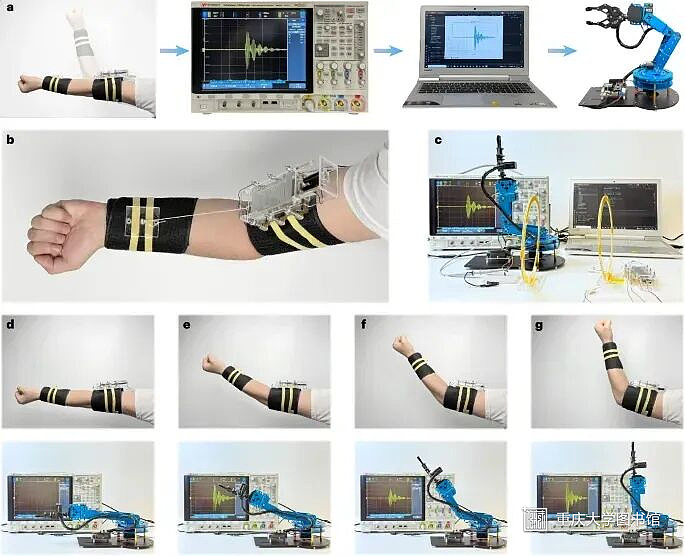
在完成系统设计与性能验证后,研究团队进一步展示了实际应用场景。图6清晰呈现了从“人动”到“机动”的全过程。当用户佩戴SAMS并进行手臂弯曲时,系统自动生成无线信号,通过示波器与计算机处理后,驱动机械臂同步运动(图6d–g)。不同弯曲角度对应不同信号特征,从而实现精细控制。值得关注的是,该系统无需持续供电,仅在动作发生时产生信号。相比传统蓝牙传感器,其能耗降低约497倍,平均功率仅0.48 mW。这种“按需供能”的模式,极大提升了系统效率与可持续性。此外,该系统还可拓展至其他关节监测,并可间接获取角度、速度等动态信息,为复杂人机交互提供更多数据支持。
总体来看,这项研究通过摩擦纳米发电与强耦合磁共振的深度融合,成功构建了一种无需电池的可穿戴无线传感系统,实现了从人体动作到机器人控制的直接转化。其核心创新在于高效能量采集结构与机械脉冲触发机制,使得“自供能+无线传输”真正落地。这一成果不仅在技术上突破了传统传感系统对电池的依赖,也在理念上推动了“绿色电子”和“低功耗智能系统”的发展。未来,该技术有望在智能制造、远程医疗、虚拟现实以及柔性机器人等领域发挥重要作用,让人机交互更加自然、高效与可持续。
从“人动”到“机动”,无电池控制技术来了-1
从“人动”到“机动”,无电池控制技术来了-2
从“人动”到“机动”,无电池控制技术来了-3
从“人动”到“机动”,无电池控制技术来了-4
从“人动”到“机动”,无电池控制技术来了-5
从“人动”到“机动”,无电池控制技术来了-6
从“人动”到“机动”,无电池控制技术来了-1
从“人动”到“机动”,无电池控制技术来了-2
从“人动”到“机动”,无电池控制技术来了-3
从“人动”到“机动”,无电池控制技术来了-4
从“人动”到“机动”,无电池控制技术来了-5
从“人动”到“机动”,无电池控制技术来了-6









